
Introduction
Dans le domaine industriel moderne, les moteurs à broche et les servomoteurs sont des moteurs courants et importants. Ils jouent un rôle clé dans les machines-outils CNC, les équipements d'automatisation et les robots. Cependant, de nombreuses personnes ne connaissent pas la différence entre ces deux moteurs. Cet article abordera en détail la différence entre les moteurs à broche et les servomoteurs sous trois aspects : le principe, la configuration et la plage de fonctionnement, pour aider les lecteurs à mieux comprendre et appliquer ces deux moteurs.

Différence de principe
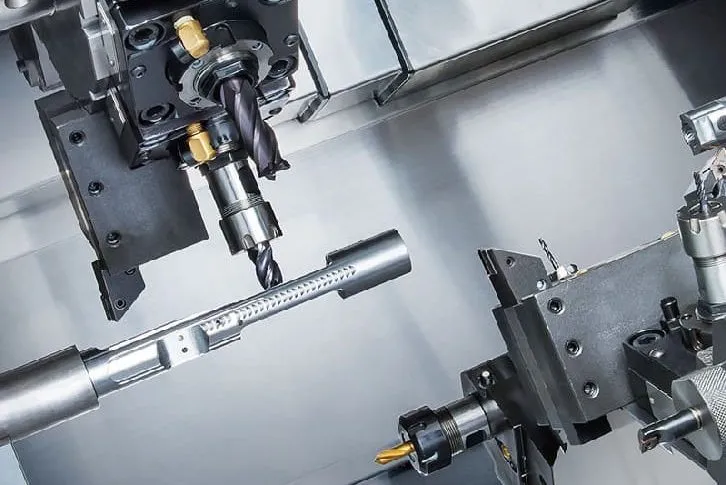
Le moteur de broche est un moteur asynchrone de haute précision conçu pour répondre aux besoins de divers types de machines-outils CNC. Il présente d'excellentes caractéristiques dynamiques et peut réaliser une large gamme de fonctions de régulation de vitesse tout en offrant un contrôle de position précis. Cela permet au moteur de broche d'entraîner la broche de manière stable et efficace pendant le processus de traitement, répondant aux exigences de différentes vitesses et précisions de traitement.
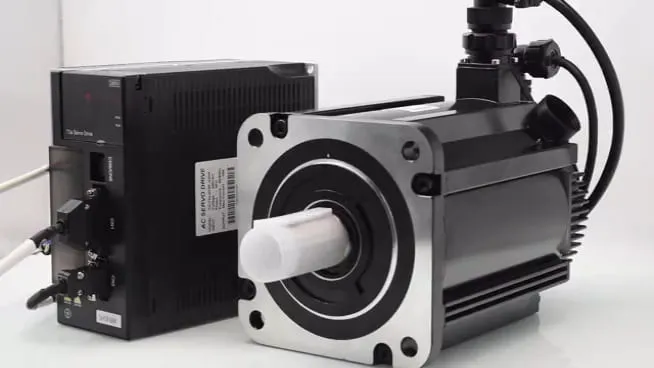
En revanche, les servomoteurs sont principalement utilisés pour contrôler la position, la vitesse et le couple afin de garantir que le système mécanique fonctionne selon la trajectoire et la vitesse prédéterminées. Sa fonction principale est de déplacer la pièce vers l'outil ou l'outil vers la pièce pour garantir la précision et la stabilité du processus de traitement. Le servomoteur reçoit des signaux de commande et ajuste sa sortie pour obtenir un contrôle précis du mouvement. Cette grande réactivité et cette précision le rendent indispensable dans les applications de positionnement de haute précision.
Différences de configuration
Il existe également des différences significatives entre les moteurs à broche et les servomoteurs en termes de structure et de configuration. Les moteurs à broche sont généralement utilisés dans les systèmes servo à courant alternatif et leur structure d'enroulement de stator est conçue pour être proche d'une forme d'onde sinusoïdale afin de garantir la douceur et la stabilité de la forme d'onde du courant. Cette conception permet de réduire les vibrations et le bruit pendant le fonctionnement du moteur et d'améliorer l'efficacité de fonctionnement et la durée de vie.
D'autre part, les servomoteurs sont principalement utilisés dans les systèmes servo numériques et leur structure d'enroulement de stator est sensiblement différente de celle des moteurs à broche. La structure d'enroulement des servomoteurs est optimisée pour obtenir une réponse rapide et un contrôle de haute précision et peut répondre rapidement et avec précision aux changements de signaux de commande. Cette conception structurelle confère aux servomoteurs d'excellentes performances de positionnement et de contrôle de vitesse et convient à diverses occasions de contrôle de précision.
Différences dans la plage de travail
La plage de fonctionnement des moteurs de broche est principalement concentrée dans la zone de puissance constante entre la vitesse nominale et la vitesse élevée. Pour obtenir une gamme plus large de fonctions de régulation de vitesse, la vitesse nominale des moteurs de broche est généralement conçue dans une plage inférieure. Cela permet au moteur de maintenir une puissance de sortie stable à des vitesses élevées pour répondre aux besoins de différentes conditions de traitement.
Les servomoteurs fonctionnent principalement dans la zone de couple constant entre les vitesses basses et nominales. Dans cette plage, les servomoteurs peuvent fournir un couple de sortie constant et maintenir des performances stables quelles que soient les variations de vitesse. Cette caractéristique permet aux servomoteurs de bien fonctionner dans les applications qui nécessitent un contrôle précis du couple et une vitesse stable, garantissant un fonctionnement fluide et un contrôle de haute précision des systèmes mécaniques.

Conclusion
En résumé, les moteurs à broche et les servomoteurs diffèrent en termes de principe, de configuration et de plage de fonctionnement. Les moteurs à broche fournissent une puissance de rotation stable et efficace adaptée à diverses vitesses de traitement et exigences de précision ; les servomoteurs se concentrent sur le contrôle précis des mouvements pour garantir que les systèmes mécaniques fonctionnent selon des trajectoires et des vitesses prédéterminées. Comprendre et appliquer correctement les caractéristiques de ces deux moteurs est essentiel pour améliorer les performances et l'efficacité des équipements industriels.
FAQ récapitulative basée sur l'article
1. Quelles sont les différences entre les moteurs à broche et les servomoteurs dans les domaines d'application ?
Les moteurs de broche sont principalement utilisés pour entraîner les broches des machines-outils afin de répondre à différentes exigences de vitesse de traitement et de précision ; les servomoteurs sont principalement utilisés pour contrôler avec précision la position, la vitesse et le couple des systèmes mécaniques et sont largement utilisés dans le contrôle d'automatisation et la robotique.
2. Pourquoi les vitesses nominales des moteurs de broche sont-elles conçues pour être dans une plage inférieure ?
La conception de la vitesse nominale du moteur de broche dans une plage inférieure peut garantir que la puissance de sortie peut être maintenue constante à grande vitesse, permettant ainsi d'obtenir une gamme plus complète de fonctions de régulation de vitesse et de répondre aux besoins de différentes conditions de traitement.
3. Comment le servomoteur parvient-il à un contrôle de mouvement de haute précision ?
Le servomoteur ajuste avec précision sa position de sortie, sa vitesse et son couple en recevant et en répondant aux signaux de commande. Sa structure d'enroulement optimisée et sa conception hautement réactive lui permettent d'exécuter rapidement et avec précision les instructions de commande et d'obtenir un contrôle de mouvement de haute précision.
4. Pourquoi la structure de l'enroulement du stator du moteur de broche est-elle conçue pour être proche d'une forme d'onde sinusoïdale ?
Cette conception permet de générer une forme d'onde de courant régulière et stable, de réduire les vibrations et le bruit pendant le fonctionnement du moteur et d'améliorer l'efficacité de fonctionnement et la durée de vie de l'équipement.
- RicoCNC dispose d'une équipe de professionnels qui se consacrent depuis de nombreuses années à la conception, à la production, à la vente et à la maintenance de broches électriques. Notre société accepte l'achat de différents types de broches CNC.
moteurs de broche CNC refroidis par eau
moteurs de broche CNC refroidis par air
Emoteurs de broche de machine à banderoler dge.
- Si vous avez besoin d'une broche CNC, veuillez nous contacter.